
Digital Twinning Environment
Team members; Dr James Douthwaite, Dr Jonathan Aitken, University of 91Ö±˛Ą
The digital twin (DT) environment, based in Unity3D takes advantage of a commercial game engine to produce a high fidelity platform for the digital representation of real-world industrial processes. Digital twinning, amongst other industry 4.0 technologies, is currently one of the most promising approaches to digitising conventional manufacturing and medical practices, increasing the availability of data to external tools and analyses. The platform itself is an attractive 3D environment which can be interacted with using Augmented/Virtual Reality (AR/VR).
We define a digital twin (DT) as a single entity (such as a robotic manipulator) within the environment with the ability to connect to a physical twin that exists in the real world. There are a number of technical challenges that must be overcome to be able to represent their capabilities and limitations effectively in order to produce a high-fidelity digital twin.

Figure 1: The digital twin environment applied to are
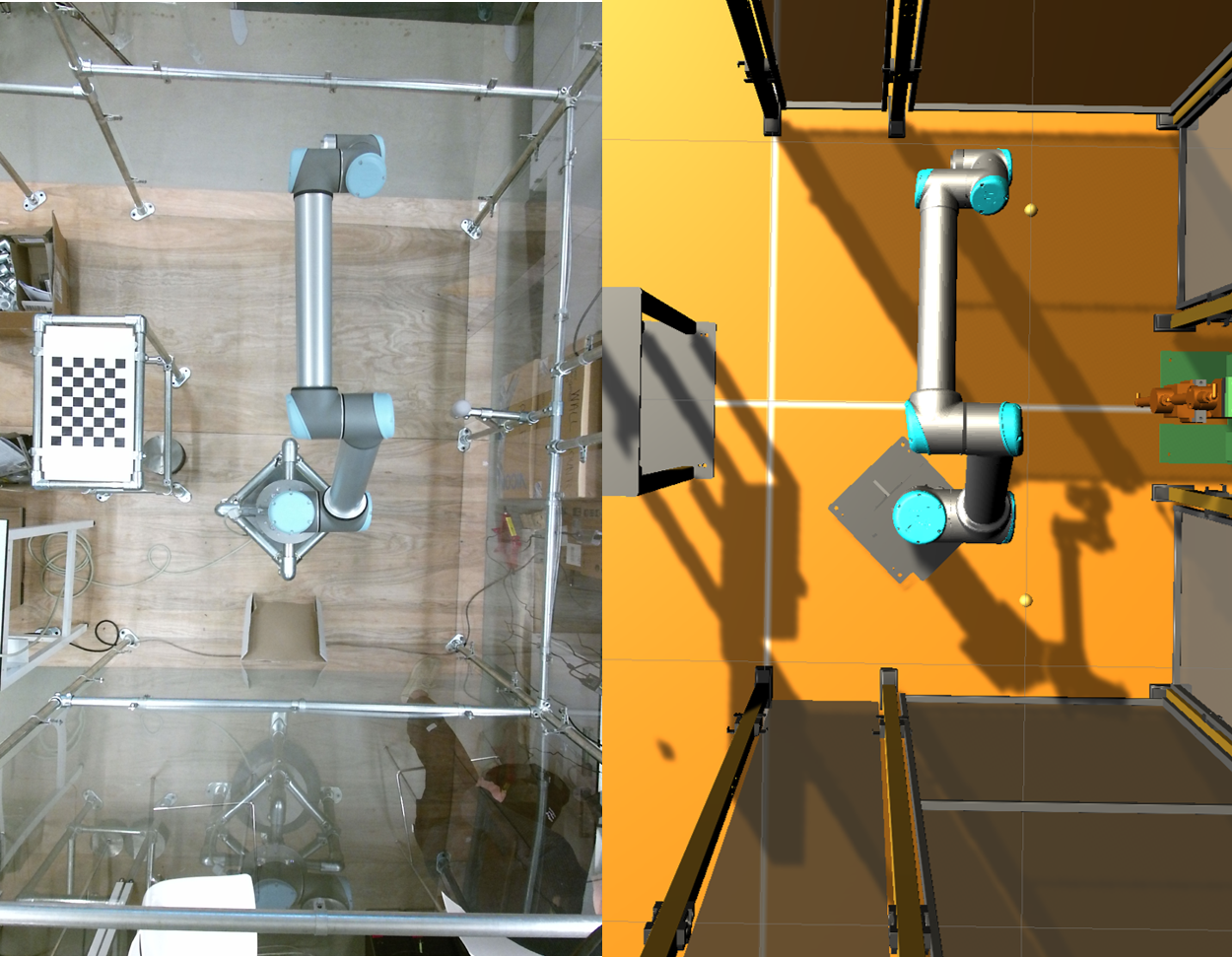
Figure 2: The digital twin environment applied in our prototype cell at 91Ö±˛Ą Robots.
The current framework hosts a number of digital twins using a common communication framework to exchange information within the environment. Similar to the Robotic Operating System (ROS), digital twins exchange data in order to communicate their paths, alerts and any problems that may occur. In the event that a physical twin is available, this data is exchanged with the robot using a common interface (such as ROS).
In more complex processes, that may have sophisticated workflows and multiple stages, the current communication framework increases the availability of data to the user to aid in problem solving. This opens up new opportunities for machine learning, safety analysis, training and informed process design.
In addition to the technical challenges of accurate representation of digital twins this work package is responsible for the integration of new tools to support our industrial and academic partners. These are currently used to validate new safety assurance principles, prototype and test new control schemas in order to inform and enhance real world processes. This is achieved through an array of supporting tools for analysis, data pipelining and databasing. These are highly standardised; aimed at supporting wider investigation into industry 4.0 principles and the generalisation of digital twinning technologies.
Publications
[1] Douthwaite, J.A., Law, J., Aitken, J.M. (submitted) A Digital Twinning Environment for Industrial Robotics, International Conference on Robotics and Automation, 2020.